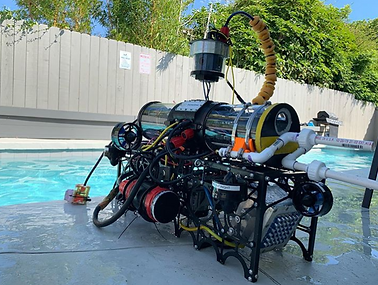
At CU Boulder, I joined the RoboSub club which is an interdisciplinary team with the goal of creating an autonomous underwater vehicle (AUV) that can successfully navigate a series of tasks at the international summer competition. The team was comprised of electrical, software, and mechanical subteams. At the start of my junior year, I became the Mechanical Team Lead and that year we were finalists in the competition. We placed 7th out of 55 teams which was a jump from the previous year's placement of 76th percentile to 87th percentile.
The competition is hosted by RoboNation and was held at SPAWAR for both of my years on the team. It was truly a humbling experience to see competing teams help each other and show off their designs.
I learned a lot about which design and communication methods are most effective as a teammate and leader. Weekly meetings were held between all team leads to strategize and discuss updates and proposed milestones. All work for RoboSub at CU Boulder is done in team members' free time, as it does not count for credit. Despite this, a relatively strict timeline is set in order to be as prepared as possible for the competition in the summer. As the mechanical team lead, I set up weekly working meetings where I checked in with and helped each member and encouraged others to give constructive feedback.